layout: post title: “pytorch深度指南-经典CNN网络源码剖析” date: 2019-1-1 16:13:58 +0800 categories: jekyll update —
经典CNN
常用来做为主干网络,也就是paper中常常提到的backbone,用于实现分类或提取特征
pytroch给出了经典网络的搭建代码,放在torchvision.models中,官方封装好了类接口,可以直接调用
此文不仅仅关注网络结构特性理解,更关注如何使用pytorch搭建网络结构
可以结合之前的博客pytorch深度指南-网络模型搭建与源码剖析,理解pytorch网络设计模式
1
2
import torch
import torchvision.models
VGG
简单介绍
VGG网络是在AlexNet网络的基础上发展而来的,其主要贡献在于使用非常小的3*3的卷积核进行网络设计,并且将网络深度增加到16-19层。在2014年ImageNet比赛中,获得了定位第1,分类第2的好成绩,网络具有很好的泛化能力。
Notice:
- 全部conv均使用了3×3的卷积核
- 一共使用了5次maxpooling,也就意味着$out_{resolution} = input_{resolution} / 2^5$
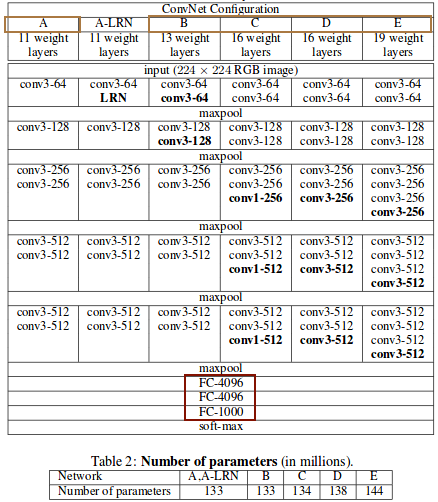
- 最后有三个全连接层(nn.Linear),因此VGG参数量巨大
- 因为用到了FC,输入tensor的H和W需要固定(3×224×224)
代码剖析
下面以常用的VGG16为例讲解
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
class VGG(nn.Module):
def __init__(self, features, num_classes=1000, init_weights=True):#ImageNet训练共1000类
super(VGG, self).__init__()
self.features = features#提取特征部分,也就是CNN部分
self.classifier = nn.Sequential(#分类部分,也就是全连接层部分
nn.Linear(512 * 7 * 7, 4096),#参数量512*7*7*4096=102,760,448
nn.ReLU(True),
nn.Dropout(),
nn.Linear(4096, 4096),#参数量4096*4096=16,777,216
nn.ReLU(True),
nn.Dropout(),
nn.Linear(4096, num_classes),#参数量4096*1000=4,096,000
)
if init_weights:
self._initialize_weights()
def forward(self, x):
x = self.features(x)#经过之前CNN输出的尺寸为(512cx7hx7w)
x = x.view(x.size(0), -1)#为了送入FC层,需要将tensor展平
x = self.classifier(x)
return x
def _initialize_weights(self):#网络权重初始化
for m in self.modules():
if isinstance(m, nn.Conv2d):#如果是卷积层
n = m.kernel_size[0] * m.kernel_size[1] * m.out_channels
m.weight.data.normal_(0, math.sqrt(2. / n))#使用normal初始化
if m.bias is not None:
m.bias.data.zero_()#对bias全部0填充
elif isinstance(m, nn.BatchNorm2d):
m.weight.data.fill_(1)
m.bias.data.zero_()
elif isinstance(m, nn.Linear):
m.weight.data.normal_(0, 0.01)
m.bias.data.zero_()
cfg = {#VGG论文表格中的网络结构config(上图),ABDE表示中四种不同深度的网络,'M'表示maxpooling
'A': [64, 'M', 128, 'M', 256, 256, 'M', 512, 512, 'M', 512, 512, 'M'],
'B': [64, 64, 'M', 128, 128, 'M', 256, 256, 'M', 512, 512, 'M', 512, 512, 'M'],
'D': [64, 64, 'M', 128, 128, 'M', 256, 256, 256, 'M', 512, 512, 512, 'M', 512, 512, 512, 'M'],
'E': [64, 64, 'M', 128, 128, 'M', 256, 256, 256, 256, 'M', 512, 512, 512, 512, 'M', 512, 512, 512, 512, 'M'],
}
def make_layers(cfg, batch_norm=False):#创建重复的网络模块
layers = []
in_channels = 3#输入通道数
for v in cfg:#从图纸cfg读入网络结构信息,判断该添加哪个模块
if v == 'M':
layers += [nn.MaxPool2d(kernel_size=2, stride=2)]
else:
conv2d = nn.Conv2d(in_channels, v, kernel_size=3, padding=1)
if batch_norm:#使用list创建一个序列,根据情况是否使用BN层
layers += [conv2d, nn.BatchNorm2d(v), nn.ReLU(inplace=True)]
else:
layers += [conv2d, nn.ReLU(inplace=True)]
in_channels = v#输入通道迭代更新
return nn.Sequential(*layers)#使用nn.Sequential(*list)创建一个串行Conv序列
def vgg16(pretrained=False, **kwargs):#VGG16使用了cfg['D']结构
"""VGG 16-layer model (configuration "D")
Args:
pretrained (bool): If True, returns a model pre-trained on ImageNet
"""
if pretrained:#是否使用预训练模型,
kwargs['init_weights'] = False
model = VGG(make_layers(cfg['D']), **kwargs)
if pretrained:
model.load_state_dict(model_zoo.load_url(model_urls['vgg16']))#加载预训练网络参数
return model
打个总结:
- 确定网络基模块,利用图纸化(cfg)搭建复杂网络结构
- 使用
nn.Sequential()打造多个重复基模块 - 如果使用FC层,需要确定输入输出节点数量
ResNet
简单介绍
Kaiming大神的代表作之一,被广泛应用于各种网络作为backbone,引入了残差概念解决梯度消失问题,使网络深度大幅度增加成为了可能。
Notice:
in_planes, out_planes即输入输出通道的数量,从Resnet之后,网络都是以模块化搭建。Resnet包含两种基本模块:- residual残差使用的是pixel-wise相加
- 基本模块:
- BasicBlock(左,Resnet-34及以下使用的模块)
- BottleNeck(右,Resnet-50及以上使用1x1conv进行通道缩放,从而减少3x3conv的参数量)
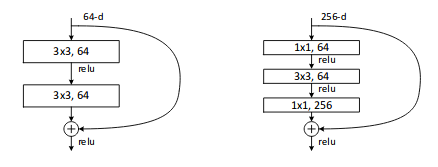 这两种网络在论文中都有详细介绍。其中浅层ReseNet-34层用了BasicBlock,深层的50及以上使用了BottleNeck
这两种网络在论文中都有详细介绍。其中浅层ReseNet-34层用了BasicBlock,深层的50及以上使用了BottleNeck - 无论哪个深度,Resnet一共包含5个stage,第一个stage使用了7×7的conv,紧跟着maxpooling
- Resnet-50和Resnet-34使用的都是[3,4,6,3]重复模式,每经过一个阶段(C2阶段除外,因为C1缩小了4倍),resolution/2,channel*2
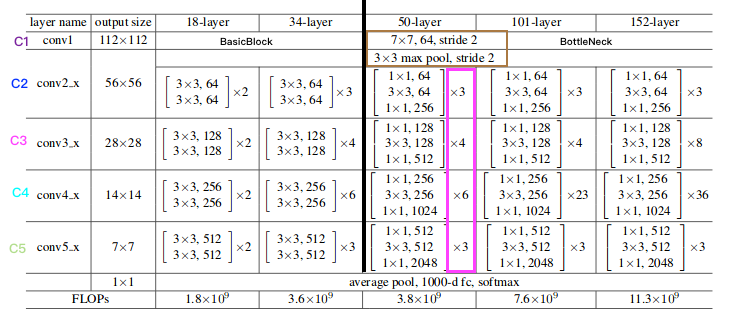
- Resnet 在stage2-5均没有用maxpooling进行resolution变化,使用stride=2进行downsample
Projection
Resnet不同stage连接处会出现通道和分辨率不匹配的问题,无法直接pixel add。为了完成尺度匹配,在每个stage的最后一个使用带有Projection的Block,即使用downsample的BasicBlock,将通道拉升到指定数量,同时使用stride=2的conv(中间3x3那个)降低分辨率
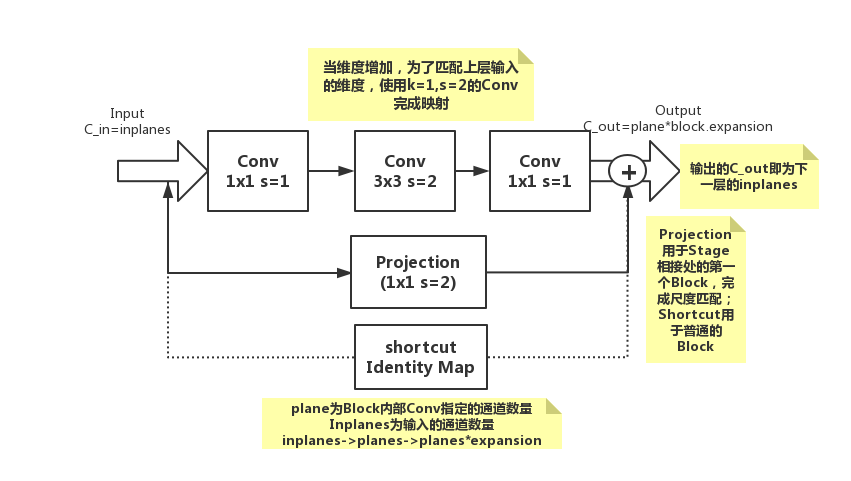
The projection shortcut in Eqn2. is used to match dimensions (done by 1x1 conv). For both options, when the shortcuts go across feature maps of two sizes, they are performed with a stride of 2.(Resnet原文介绍Projection)
代码剖析:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
def conv3x3(in_planes, out_planes, stride=1):#基本的3x3卷积
"""3x3 convolution with padding"""
return nn.Conv2d(in_planes, out_planes, kernel_size=3, stride=stride,
padding=1, bias=False)
class BasicBlock(nn.Module):#BasicBlock模块
expansion = 1
def __init__(self, inplanes, planes, stride=1, downsample=None):
super(BasicBlock, self).__init__()
self.conv1 = conv3x3(inplanes, planes, stride)
self.bn1 = nn.BatchNorm2d(planes)
self.relu = nn.ReLU(inplace=True)
self.conv2 = conv3x3(planes, planes)
self.bn2 = nn.BatchNorm2d(planes)
self.downsample = downsample
self.stride = stride
def forward(self, x):
residual = x#保留输入作为残差
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
if self.downsample is not None:#在downsample网络使用stride=2的降分辨率作为残差
residual = self.downsample(x)
out += residual#经过conv后与之前的input相加
out = self.relu(out)
return out
class Bottleneck(nn.Module):#Bottleneck模块
expansion = 4
#注意,bottleneck要对输入通道做4倍拉升,可以看上面的结构示意图中每个Block结构
#Bottleneck通道数量变化:256->64->64->256
def __init__(self, , stride=1, downsample=None):
super(Bottleneck, self).__init__()
self.conv1 = nn.Conv2d(inplanes, planes, kernel_size=1, bias=False)
self.bn1 = nn.BatchNorm2d(planes)
self.conv2 = nn.Conv2d(planes, planes, kernel_size=3, stride=stride,#该conv负责stride=2降低scale
padding=1, bias=False)
self.bn2 = nn.BatchNorm2d(planes)
self.conv3 = nn.Conv2d(planes, planes * 4, kernel_size=1, bias=False)
#最后的conv的channel是输入的4倍
self.bn3 = nn.BatchNorm2d(planes * 4)
self.relu = nn.ReLU(inplace=True)
self.downsample = downsample#downsample即stride=2的层
self.stride = stride
def forward(self, x):
residual = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
out = self.relu(out)
out = self.conv3(out)
out = self.bn3(out)
#在downsample使用了1x1,stride=2的conv降分辨率拉升通道,
#具体结构见Projection那部分示意图
if self.downsample is not None:
residual = self.downsample(x)
out += residual
out = self.relu(out)
return out
class ResNet(nn.Module):
def __init__(self, block, layers, num_classes=1000):
self.inplanes = 64
super(ResNet, self).__init__()
self.conv1 = nn.Conv2d(3, 64, kernel_size=7, stride=2, padding=3,
bias=False)#注意开始的conv1使用了K=7,S=2
self.bn1 = nn.BatchNorm2d(64)
self.relu = nn.ReLU(inplace=True)
self.maxpool = nn.MaxPool2d(kernel_size=3, stride=2, padding=1)#C1中唯一出现了一次Maxpooling
#C2-C5输入通道数量[64,128,256,512]
self.layer1 = self._make_layer(block, 64, layers[0])#注意:layer1的stride=1!,C2阶段没有降低分辨率
self.layer2 = self._make_layer(block, 128, layers[1], stride=2)
self.layer3 = self._make_layer(block, 256, layers[2], stride=2)
self.layer4 = self._make_layer(block, 512, layers[3], stride=2)
self.avgpool = nn.AvgPool2d(7, stride=1)#使用了Global Average Pooling
self.fc = nn.Linear(512 * block.expansion, num_classes)
for m in self.modules():
if isinstance(m, nn.Conv2d):
n = m.kernel_size[0] * m.kernel_size[1] * m.out_channels
m.weight.data.normal_(0, math.sqrt(2. / n))
elif isinstance(m, nn.BatchNorm2d):
m.weight.data.fill_(1)
m.bias.data.zero_()
def _make_layer(self, block, planes, blocks, stride=1):#同样使用了_make_layer的方式造基模块轮子
downsample = None
if stride != 1 or self.inplanes != planes * block.expansion:#只有在stage节点交汇处才会downsample
downsample = nn.Sequential(#downsample表示在不同stage的节点连接处降分辨率同时提升通道数
nn.Conv2d(self.inplanes, planes * block.expansion,#使用1x1升通道降分辨
kernel_size=1, stride=stride, bias=False),
nn.BatchNorm2d(planes * block.expansion),
)
layers = []
layers.append(block(self.inplanes, planes, stride, downsample))#每个stage的第一个block可能会有downsample,
self.inplanes = planes * block.expansion#迭代更新inplanes=planes*4,为下一层输入的通道数量
for i in range(1, blocks):#剩余的block都是同样的搞法
layers.append(block(self.inplanes, planes))
return nn.Sequential(*layers)
def forward(self, x):
x = self.conv1(x)
x = self.bn1(x)
x = self.relu(x)
x = self.maxpool(x)
x = self.layer1(x)
x = self.layer2(x)
x = self.layer3(x)
x = self.layer4(x)
x = self.avgpool(x)
x = x.view(x.size(0), -1)#尺度变化从而送入后面的全连接层
x = self.fc(x)
return x
def resnet50(pretrained=False, **kwargs):#Resnet API调用接口
"""Constructs a ResNet-50 model.
Args:
pretrained (bool): If True, returns a model pre-trained on ImageNet
"""
model = ResNet(Bottleneck, [3, 4, 6, 3], **kwargs)#[3,4,6,3]为各个stage中block重复次数
if pretrained:
model.load_state_dict(model_zoo.load_url(model_urls['resnet50']))
return model
Inception
简单介绍
代码剖析
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
222
223
224
225
226
227
228
229
230
231
232
233
234
235
236
237
238
239
240
241
242
243
244
245
246
247
248
249
250
251
252
253
254
255
256
257
258
259
260
261
262
263
264
265
266
267
268
269
270
271
272
273
274
275
276
277
278
279
280
281
282
283
284
285
286
287
288
289
290
291
292
293
294
295
296
297
298
299
300
301
302
303
304
305
306
307
308
309
310
311
312
313
def inception_v3(pretrained=False, **kwargs):
r"""Inception v3 model architecture from
`"Rethinking the Inception Architecture for Computer Vision" <http://arxiv.org/abs/1512.00567>`_.
Args:
pretrained (bool): If True, returns a model pre-trained on ImageNet
"""
if pretrained:
if 'transform_input' not in kwargs:
kwargs['transform_input'] = True
model = Inception3(**kwargs)
model.load_state_dict(model_zoo.load_url(model_urls['inception_v3_google']))
return model
return Inception3(**kwargs)
class Inception3(nn.Module):
def __init__(self, num_classes=1000, aux_logits=True, transform_input=False):
super(Inception3, self).__init__()
self.aux_logits = aux_logits
self.transform_input = transform_input
self.Conv2d_1a_3x3 = BasicConv2d(3, 32, kernel_size=3, stride=2)
self.Conv2d_2a_3x3 = BasicConv2d(32, 32, kernel_size=3)
self.Conv2d_2b_3x3 = BasicConv2d(32, 64, kernel_size=3, padding=1)
self.Conv2d_3b_1x1 = BasicConv2d(64, 80, kernel_size=1)
self.Conv2d_4a_3x3 = BasicConv2d(80, 192, kernel_size=3)
self.Mixed_5b = InceptionA(192, pool_features=32)
self.Mixed_5c = InceptionA(256, pool_features=64)
self.Mixed_5d = InceptionA(288, pool_features=64)
self.Mixed_6a = InceptionB(288)
self.Mixed_6b = InceptionC(768, channels_7x7=128)
self.Mixed_6c = InceptionC(768, channels_7x7=160)
self.Mixed_6d = InceptionC(768, channels_7x7=160)
self.Mixed_6e = InceptionC(768, channels_7x7=192)
if aux_logits:
self.AuxLogits = InceptionAux(768, num_classes)
self.Mixed_7a = InceptionD(768)
self.Mixed_7b = InceptionE(1280)
self.Mixed_7c = InceptionE(2048)
self.fc = nn.Linear(2048, num_classes)
for m in self.modules():
if isinstance(m, nn.Conv2d) or isinstance(m, nn.Linear):
import scipy.stats as stats
stddev = m.stddev if hasattr(m, 'stddev') else 0.1
X = stats.truncnorm(-2, 2, scale=stddev)
values = torch.Tensor(X.rvs(m.weight.data.numel()))
values = values.view(m.weight.data.size())
m.weight.data.copy_(values)
elif isinstance(m, nn.BatchNorm2d):
m.weight.data.fill_(1)
m.bias.data.zero_()
def forward(self, x):
if self.transform_input:
x = x.clone()
x[:, 0] = x[:, 0] * (0.229 / 0.5) + (0.485 - 0.5) / 0.5
x[:, 1] = x[:, 1] * (0.224 / 0.5) + (0.456 - 0.5) / 0.5
x[:, 2] = x[:, 2] * (0.225 / 0.5) + (0.406 - 0.5) / 0.5
# 299 x 299 x 3
x = self.Conv2d_1a_3x3(x)
# 149 x 149 x 32
x = self.Conv2d_2a_3x3(x)
# 147 x 147 x 32
x = self.Conv2d_2b_3x3(x)
# 147 x 147 x 64
x = F.max_pool2d(x, kernel_size=3, stride=2)
# 73 x 73 x 64
x = self.Conv2d_3b_1x1(x)
# 73 x 73 x 80
x = self.Conv2d_4a_3x3(x)
# 71 x 71 x 192
x = F.max_pool2d(x, kernel_size=3, stride=2)
# 35 x 35 x 192
x = self.Mixed_5b(x)
# 35 x 35 x 256
x = self.Mixed_5c(x)
# 35 x 35 x 288
x = self.Mixed_5d(x)
# 35 x 35 x 288
x = self.Mixed_6a(x)
# 17 x 17 x 768
x = self.Mixed_6b(x)
# 17 x 17 x 768
x = self.Mixed_6c(x)
# 17 x 17 x 768
x = self.Mixed_6d(x)
# 17 x 17 x 768
x = self.Mixed_6e(x)
# 17 x 17 x 768
if self.training and self.aux_logits:
aux = self.AuxLogits(x)
# 17 x 17 x 768
x = self.Mixed_7a(x)
# 8 x 8 x 1280
x = self.Mixed_7b(x)
# 8 x 8 x 2048
x = self.Mixed_7c(x)
# 8 x 8 x 2048
x = F.avg_pool2d(x, kernel_size=8)
# 1 x 1 x 2048
x = F.dropout(x, training=self.training)
# 1 x 1 x 2048
x = x.view(x.size(0), -1)
# 2048
x = self.fc(x)
# 1000 (num_classes)
if self.training and self.aux_logits:
return x, aux
return x
class InceptionA(nn.Module):
def __init__(self, in_channels, pool_features):
super(InceptionA, self).__init__()
self.branch1x1 = BasicConv2d(in_channels, 64, kernel_size=1)
self.branch5x5_1 = BasicConv2d(in_channels, 48, kernel_size=1)
self.branch5x5_2 = BasicConv2d(48, 64, kernel_size=5, padding=2)
self.branch3x3dbl_1 = BasicConv2d(in_channels, 64, kernel_size=1)
self.branch3x3dbl_2 = BasicConv2d(64, 96, kernel_size=3, padding=1)
self.branch3x3dbl_3 = BasicConv2d(96, 96, kernel_size=3, padding=1)
self.branch_pool = BasicConv2d(in_channels, pool_features, kernel_size=1)
def forward(self, x):
branch1x1 = self.branch1x1(x)
branch5x5 = self.branch5x5_1(x)
branch5x5 = self.branch5x5_2(branch5x5)
branch3x3dbl = self.branch3x3dbl_1(x)
branch3x3dbl = self.branch3x3dbl_2(branch3x3dbl)
branch3x3dbl = self.branch3x3dbl_3(branch3x3dbl)
branch_pool = F.avg_pool2d(x, kernel_size=3, stride=1, padding=1)
branch_pool = self.branch_pool(branch_pool)
outputs = [branch1x1, branch5x5, branch3x3dbl, branch_pool]
return torch.cat(outputs, 1)
class InceptionB(nn.Module):
def __init__(self, in_channels):
super(InceptionB, self).__init__()
self.branch3x3 = BasicConv2d(in_channels, 384, kernel_size=3, stride=2)
self.branch3x3dbl_1 = BasicConv2d(in_channels, 64, kernel_size=1)
self.branch3x3dbl_2 = BasicConv2d(64, 96, kernel_size=3, padding=1)
self.branch3x3dbl_3 = BasicConv2d(96, 96, kernel_size=3, stride=2)
def forward(self, x):
branch3x3 = self.branch3x3(x)
branch3x3dbl = self.branch3x3dbl_1(x)
branch3x3dbl = self.branch3x3dbl_2(branch3x3dbl)
branch3x3dbl = self.branch3x3dbl_3(branch3x3dbl)
branch_pool = F.max_pool2d(x, kernel_size=3, stride=2)
outputs = [branch3x3, branch3x3dbl, branch_pool]
return torch.cat(outputs, 1)
class InceptionC(nn.Module):
def __init__(self, in_channels, channels_7x7):
super(InceptionC, self).__init__()
self.branch1x1 = BasicConv2d(in_channels, 192, kernel_size=1)
c7 = channels_7x7
self.branch7x7_1 = BasicConv2d(in_channels, c7, kernel_size=1)
self.branch7x7_2 = BasicConv2d(c7, c7, kernel_size=(1, 7), padding=(0, 3))
self.branch7x7_3 = BasicConv2d(c7, 192, kernel_size=(7, 1), padding=(3, 0))
self.branch7x7dbl_1 = BasicConv2d(in_channels, c7, kernel_size=1)
self.branch7x7dbl_2 = BasicConv2d(c7, c7, kernel_size=(7, 1), padding=(3, 0))
self.branch7x7dbl_3 = BasicConv2d(c7, c7, kernel_size=(1, 7), padding=(0, 3))
self.branch7x7dbl_4 = BasicConv2d(c7, c7, kernel_size=(7, 1), padding=(3, 0))
self.branch7x7dbl_5 = BasicConv2d(c7, 192, kernel_size=(1, 7), padding=(0, 3))
self.branch_pool = BasicConv2d(in_channels, 192, kernel_size=1)
def forward(self, x):
branch1x1 = self.branch1x1(x)
branch7x7 = self.branch7x7_1(x)
branch7x7 = self.branch7x7_2(branch7x7)
branch7x7 = self.branch7x7_3(branch7x7)
branch7x7dbl = self.branch7x7dbl_1(x)
branch7x7dbl = self.branch7x7dbl_2(branch7x7dbl)
branch7x7dbl = self.branch7x7dbl_3(branch7x7dbl)
branch7x7dbl = self.branch7x7dbl_4(branch7x7dbl)
branch7x7dbl = self.branch7x7dbl_5(branch7x7dbl)
branch_pool = F.avg_pool2d(x, kernel_size=3, stride=1, padding=1)
branch_pool = self.branch_pool(branch_pool)
outputs = [branch1x1, branch7x7, branch7x7dbl, branch_pool]
return torch.cat(outputs, 1)
class InceptionD(nn.Module):
def __init__(self, in_channels):
super(InceptionD, self).__init__()
self.branch3x3_1 = BasicConv2d(in_channels, 192, kernel_size=1)
self.branch3x3_2 = BasicConv2d(192, 320, kernel_size=3, stride=2)
self.branch7x7x3_1 = BasicConv2d(in_channels, 192, kernel_size=1)
self.branch7x7x3_2 = BasicConv2d(192, 192, kernel_size=(1, 7), padding=(0, 3))
self.branch7x7x3_3 = BasicConv2d(192, 192, kernel_size=(7, 1), padding=(3, 0))
self.branch7x7x3_4 = BasicConv2d(192, 192, kernel_size=3, stride=2)
def forward(self, x):
branch3x3 = self.branch3x3_1(x)
branch3x3 = self.branch3x3_2(branch3x3)
branch7x7x3 = self.branch7x7x3_1(x)
branch7x7x3 = self.branch7x7x3_2(branch7x7x3)
branch7x7x3 = self.branch7x7x3_3(branch7x7x3)
branch7x7x3 = self.branch7x7x3_4(branch7x7x3)
branch_pool = F.max_pool2d(x, kernel_size=3, stride=2)
outputs = [branch3x3, branch7x7x3, branch_pool]
return torch.cat(outputs, 1)
class InceptionE(nn.Module):
def __init__(self, in_channels):
super(InceptionE, self).__init__()
self.branch1x1 = BasicConv2d(in_channels, 320, kernel_size=1)
self.branch3x3_1 = BasicConv2d(in_channels, 384, kernel_size=1)
self.branch3x3_2a = BasicConv2d(384, 384, kernel_size=(1, 3), padding=(0, 1))
self.branch3x3_2b = BasicConv2d(384, 384, kernel_size=(3, 1), padding=(1, 0))
self.branch3x3dbl_1 = BasicConv2d(in_channels, 448, kernel_size=1)
self.branch3x3dbl_2 = BasicConv2d(448, 384, kernel_size=3, padding=1)
self.branch3x3dbl_3a = BasicConv2d(384, 384, kernel_size=(1, 3), padding=(0, 1))
self.branch3x3dbl_3b = BasicConv2d(384, 384, kernel_size=(3, 1), padding=(1, 0))
self.branch_pool = BasicConv2d(in_channels, 192, kernel_size=1)
def forward(self, x):
branch1x1 = self.branch1x1(x)
branch3x3 = self.branch3x3_1(x)
branch3x3 = [
self.branch3x3_2a(branch3x3),
self.branch3x3_2b(branch3x3),
]
branch3x3 = torch.cat(branch3x3, 1)
branch3x3dbl = self.branch3x3dbl_1(x)
branch3x3dbl = self.branch3x3dbl_2(branch3x3dbl)
branch3x3dbl = [
self.branch3x3dbl_3a(branch3x3dbl),
self.branch3x3dbl_3b(branch3x3dbl),
]
branch3x3dbl = torch.cat(branch3x3dbl, 1)
branch_pool = F.avg_pool2d(x, kernel_size=3, stride=1, padding=1)
branch_pool = self.branch_pool(branch_pool)
outputs = [branch1x1, branch3x3, branch3x3dbl, branch_pool]
return torch.cat(outputs, 1)
class InceptionAux(nn.Module):
def __init__(self, in_channels, num_classes):
super(InceptionAux, self).__init__()
self.conv0 = BasicConv2d(in_channels, 128, kernel_size=1)
self.conv1 = BasicConv2d(128, 768, kernel_size=5)
self.conv1.stddev = 0.01
self.fc = nn.Linear(768, num_classes)
self.fc.stddev = 0.001
def forward(self, x):
# 17 x 17 x 768
x = F.avg_pool2d(x, kernel_size=5, stride=3)
# 5 x 5 x 768
x = self.conv0(x)
# 5 x 5 x 128
x = self.conv1(x)
# 1 x 1 x 768
x = x.view(x.size(0), -1)
# 768
x = self.fc(x)
# 1000
return x
class BasicConv2d(nn.Module):
def __init__(self, in_channels, out_channels, **kwargs):
super(BasicConv2d, self).__init__()
self.conv = nn.Conv2d(in_channels, out_channels, bias=False, **kwargs)
self.bn = nn.BatchNorm2d(out_channels, eps=0.001)
def forward(self, x):
x = self.conv(x)
x = self.bn(x)
return F.relu(x, inplace=True)